(2) 機構系モデルの作成
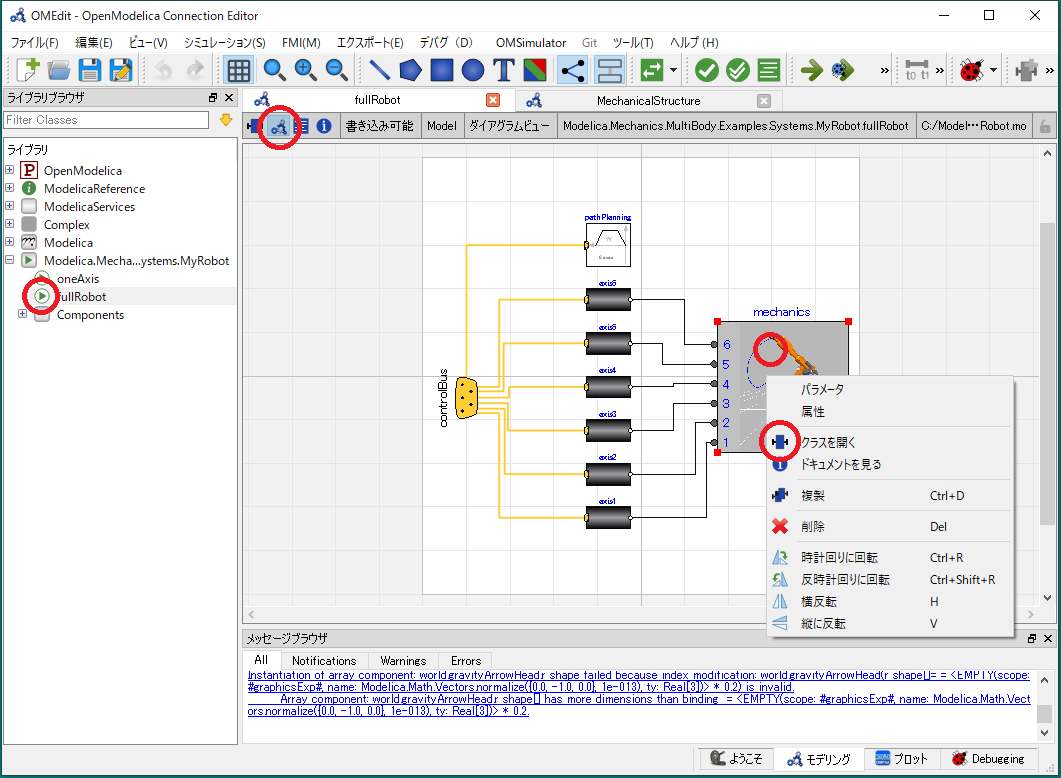
OpenModelicaの例題にある6軸ロボットアームの機構パラメータを読み取るため,ライブラリブラウザのfullRobotを選択し,モデル図を表示します. そして,右側にあるMechanicsのところでマウスの右ボタンをクリックし,「クラスを開く」を選択します.
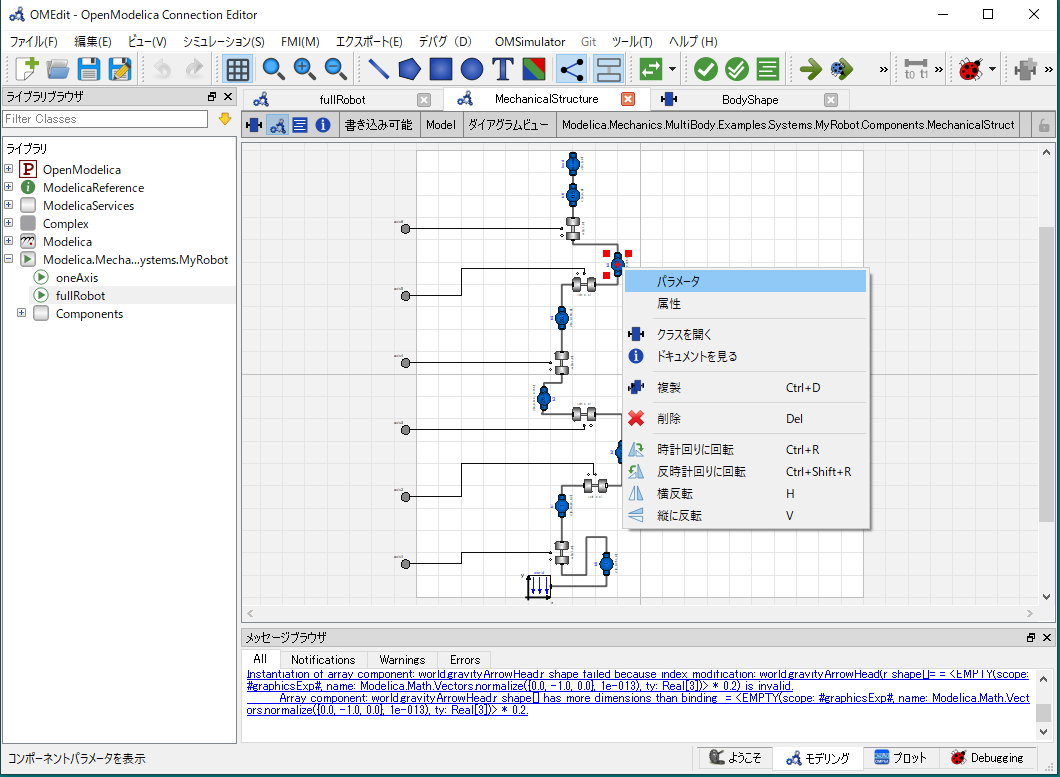
そうして開いた画面で,機構の剛体要素を示す青いアイテム上で右クリックし,「パラメータ」を選択します.
次に開いた画面には,剛体要素の性質を表す各パラメータが現れます.
これらパラメータには,その意味と数値が明記されているので,それを,該当するエクセルの入力シートに記入してゆきます.
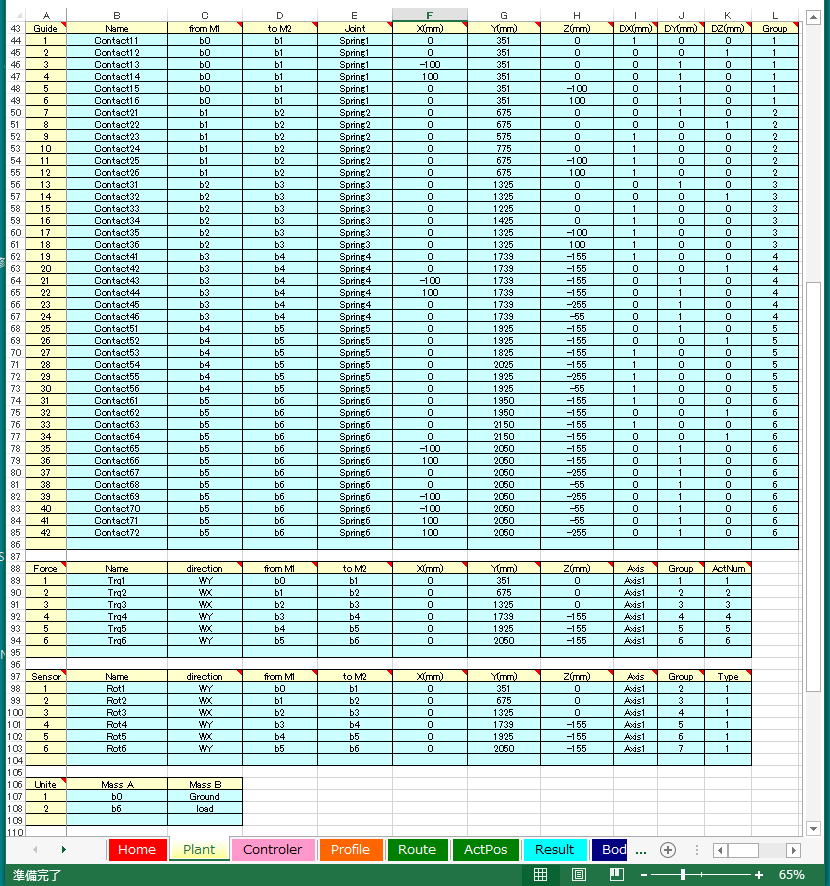
ここから先は,数学屋ほん舗のMBD環境が必要になります.この先も体験してみたい方はご連絡ください. さて,エクセルのタグにPlantと書いてあるシートが機構モデルの入力用シートです. ここには,上からAxis, Damping, Mass, Spring, Connect, Guide, Force, Sensor という名称の表がならんでいます. Axisはローカル座標系の方向を示しています.3つの数値は左からωx,ωy,ωzです.deg単位で記入します. Dampingは機構全体に共通する減衰係数です.鉄鋼材料からできた機構の場合,経験的に0.015くらいが妥当です. Massでは,機構を構成する剛体要素の質量や慣性モーメント,そして重心位置の絶対座標と適用するローカル座標とグループ番号を記入します. グループ番号とは,各軸の動作で一緒に移動する剛体要素を識別する番号です. Springでは剛性要素のばね定数だけを記入します. Connectは,結合する2つの剛体要素名(順番は無関係)と各方向に使用する剛体要素名,結合位置の絶対座標とローカル座標名を記入します.
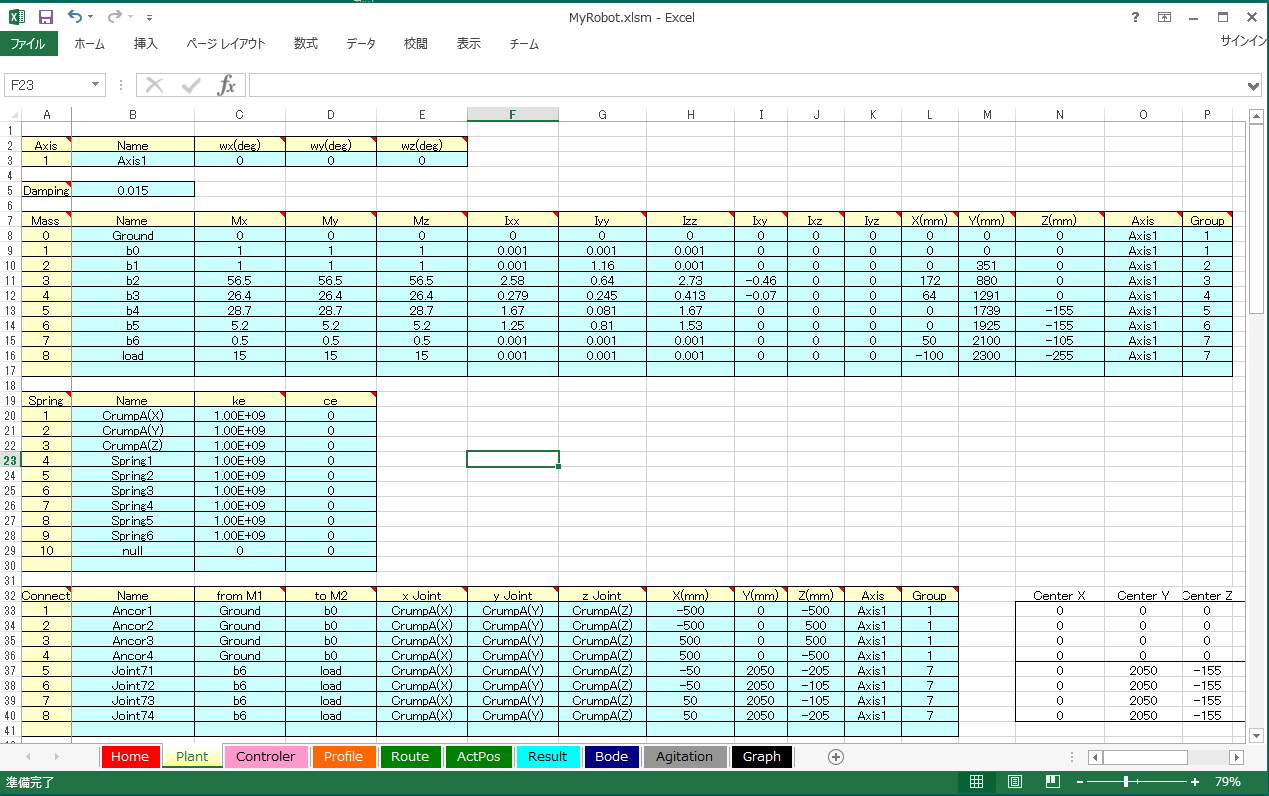
Guideは,案内要素を表現します.結合する2つの剛体要素名(順番は無関係)と拘束する方向に使用する剛体要素名,結合位置の絶対座標と拘束方向ベクトルを記入します. Forceは,駆動力を表現します.駆動方向と作用する剛体要素名(順番は無関係)と作用点の絶対座標とローカル座標,グループ番号,駆動軸番号を記入します. Sensorは,変位計測を示します.計測方向と計測する剛体要素名(順番は無関係)と計測点の絶対座標とローカル座標,グループ番号,最後に計測タイプを記入します. なお,距離計測センサで計測タイプを1にすると,三角関数の線形近似誤差を補正します. そして,最後にあるUniteに剛体要素名を記入すると,すでに記入した2つの剛体要素を一体として扱います. 余分な機能のようですが,モデル規模を縮小するときに役立ちます.さて,機構のバネマスモデルは以上で設定完了です.
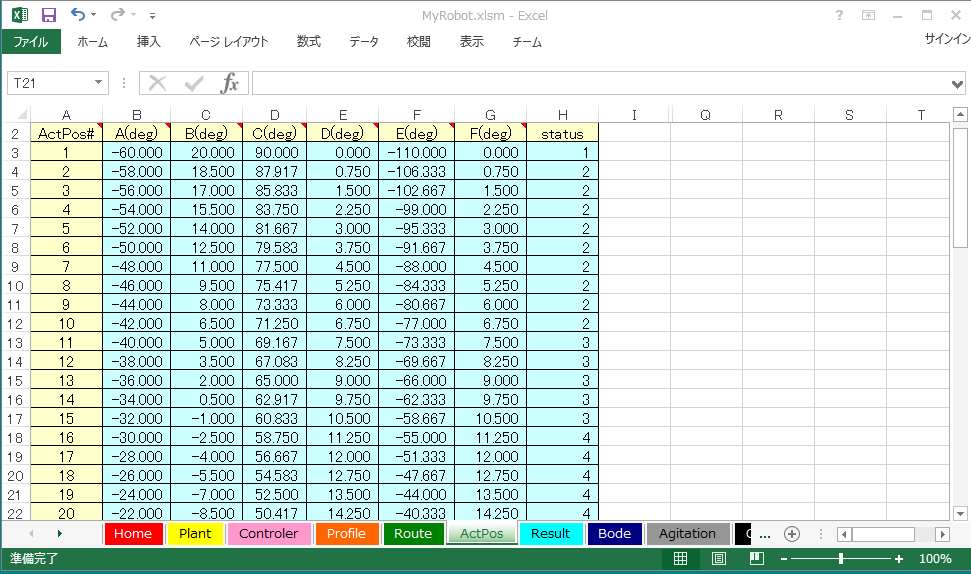
ロボットアームのように複数の関節を持つ構造の場合,関節角度が変化すれば姿勢も変化します. 数学屋ほん舗のMBDは線形モデルしか扱わないので,複数のモデルを準備する必要があります. ActPosと言う名称のシートには,最初の姿勢から最後の姿勢までの変化を区分して表現できるよう,各関節角度の組合せを20種類に分割するように指示しています. なお,Plantシートに記入した状態は,各関節角度が零になります.
今回は,システムへの指令入力としてOpenModelicaの指令入力を使いました. そのため,加速時間や最高速度を自由に設定できる自前の移動経路設定機能は不要でしたが,そういう機能も備えています.
