(4) シミュレーションの実行結果
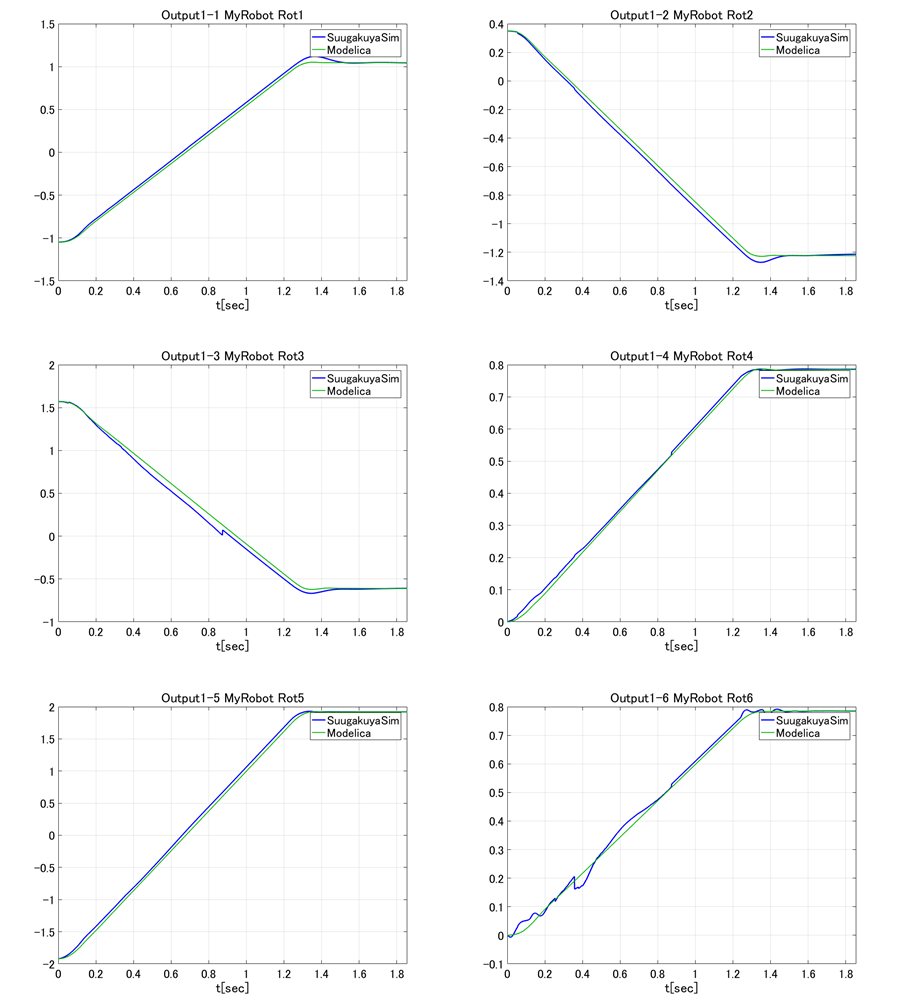
数学屋ほん舗のMBDシミュレーションは,Excelを使って作成したモデルパラメータのデータを,Matlab上に読み込んで実行します. 表面上はExcelが重要な役目を果たしているように思われるかもしれませんが,単にテキストデータを作っているだけに過ぎません. Simulinkも状態空間モデルを作っているだけです.実は一番重要なのは,余り表に出てこないmatlabのプログラムです. 機構各部の慣性や剛性から機構の特性行列を作成したり,さらに駆動力の作用点や駆動方向などの情報から機構の状態空間モデルを作成します. そして,これらは全てオリジナルのmatlab関数です.オリジナルですから怪しい訳です.何とかして検証しておきたい. 今回,webサイトで紹介することを目的に,OpenModelicaの例題である6軸ロボットアームに近いモデルを作りましたが, それは同時に,数学屋ほん舗のMBDツールが多関節ロボットに適用できることを確認することでもありました. 特に多関節ロボットの場合,複雑な座標変換を行うキネマティックスの計算を使うので,その検証を行う意味がありました. そのため,6軸ロボットアームの各軸変位角度と各軸トルクを比較しました.下の図は,各軸の角度(rad)を比較しています.始点と終点付近で微妙な違いはありますが,概ね一致しています. ここで一致するのは当たり前でして,一致しなければ制御できていないことになります.
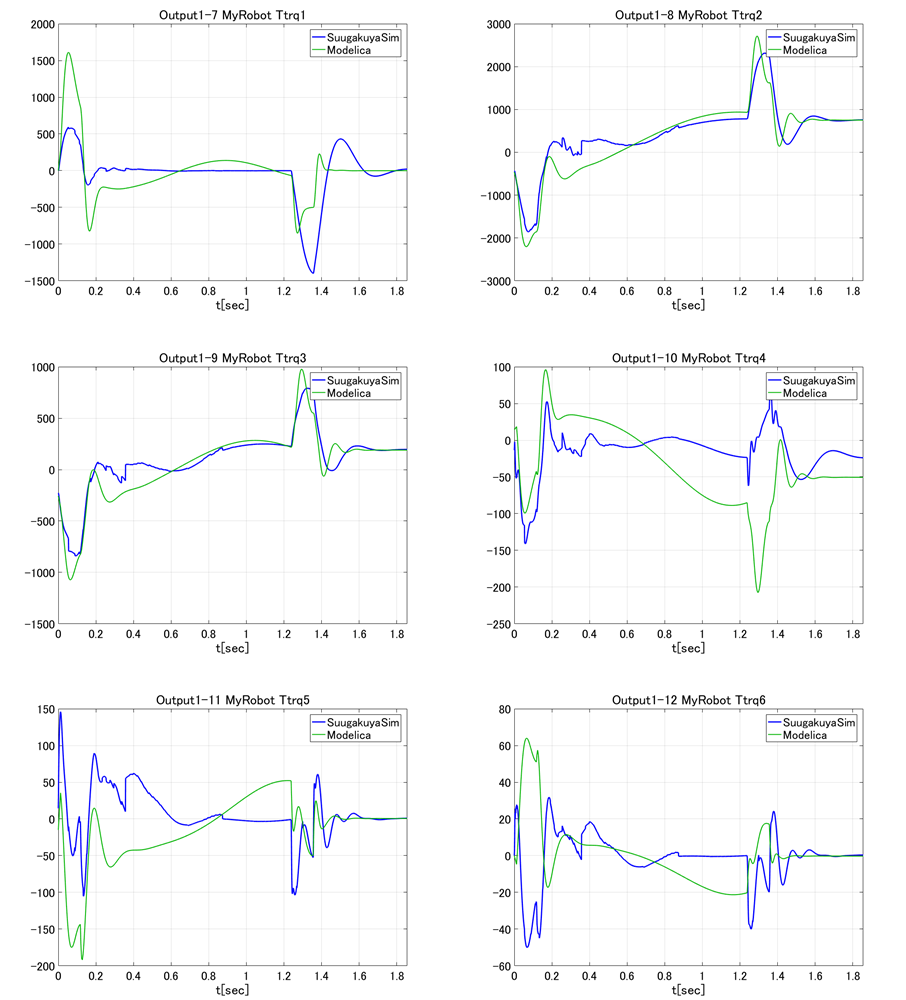
重要なのは各軸のトルクです.第1軸から第3軸までは変動幅と始点終点の値が概ね一致しています. これは,キネマティクス計算の検証と言う点では意味があると思います. 一方,第4軸から第6軸に関しては全く一致していません. 第1軸から第3軸はAxis1,第4軸から第6軸はAxis2であることを考えると,Axis2の解読に誤りがあるのでしょうか? ここはもう一度調査しなおす必要があるようです.
今回は,あまり一致しない状態でお示ししましたが,実際のMBDでは,設計者からの情報を理解しながらモデルを合せ込んでゆきます.同時に,製品にとって重要な性能とタイミングを絞り込みながら,スリムであるが精緻なモデルを作り込んでゆくのです.こうすることで,予測精度も高く演算時間の短いMBDが可能になります.
